
About

Peide Huang
Email: peterhuangsg at gmail dot com
I am a researcher at Google DeepMind, working on robot foundation models. I previously worked at Apple. I obtained my B.E. from Nanyang Technological University, M.S. from Stanford, and Ph.D. from Carnegie Mellon University.
Email / CV / Google Scholar / Twitter
News
- 09/2025: I joined Google DeepMind!
- 09/2024: I joined Apple AIML!
- 09/2024: I defended my thesis titled "Co-evolving Environments and Agents for Physical-World Deployments"!
- 11/2023: Our RoboTool is covered by TechXplore as a featured story!
- 08/2023: Two papers (one Oral) are accepted by CoRL 2023!
Publications
* indicates equal contribution
EgoDex: Learning Dexterous Manipulation from Large-Scale Egocentric Video
Ryan Hoque*, Peide Huang*, David J. Yoon*, Mouli Sivapurapu, Jian Zhang
The Fourteenth International Conference on Learning Representations (ICLR 2026), Best Paper Award at RSS2025 EgoAct Workshop
ELEGNT: Expressive and Functional Movement Design for Non-anthropomorphic Robot
Yuhan Hu, Peide Huang, Mouli Sivapurapu, Jian Zhang
Preprint
EMOTION: Expressive Motion Sequence Generation for Humanoid Robots with In-Context Learning
Peide Huang, Yuhan Hu, Nataliya Nechyporenko, Daehwa Kim, Walter Talbott, Jian Zhang
2025 IEEE Robotics and Automation Letters (RA-L)
CaDRE: Controllable and Diverse Generation of Safety-Critical Driving Scenarios using Real-World Trajectories
Peide Huang,
2025 IEEE International Conference on Robotics and Automation (ICRA 2025)
Dynamics as Prompts: In-Context Learning for Sim-to-Real System Identifications
Xilun Zhang*, Shiqi Liu*, Peide Huang, William Jongwon Han, Yiqi Lyu,
2024 IEEE Robotics and Automation Letters (RA-L)

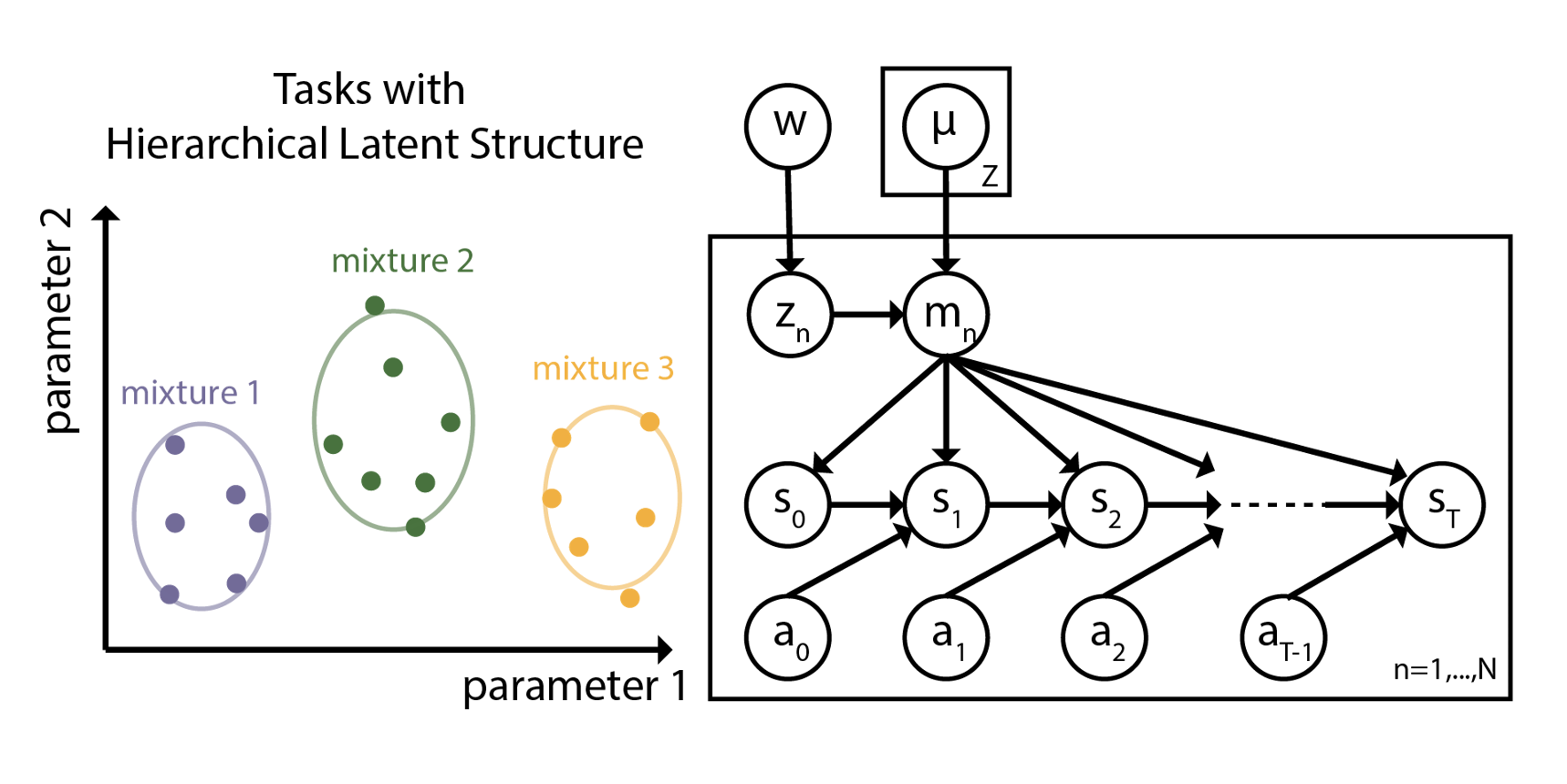
Group Distributionally Robust Reinforcement Learning with Hierarchical Latent Variables
The 26th International Conference on Artificial Intelligence and Statistics (AISTATS 2023)
Scalable Safety-Critical Policy Evaluation with Accelerated Rare Event Sampling
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2022)
Curriculum Vitae
Click here to download my full CV (last update: July 2025).
Education
Carnegie Mellon University
Aug 2020 -- Sep 2024
Ph.D. Reinforcement Learning and Robotics
M.S. Machine Learning
Stanford University
Aug 2018 -- June 2020
M.S. Robotics and Control
Nanyang Technological University, Singapore
Aug 2014 -- June 2018
B.E. Aeronautics and Space Engineering
Work
Google DeepMind
Sep 2025 -- Now
Research Scientist
Apple
May 2024 -- Sep 2025
Research Scientist
Bosch Center for Artificial Intelligence
May 2023 -- Aug 2023
Machine Learning Research Intern
Flexiv Robotics
Aug 2018 -- June 2020
System Engineering Intern
Academic Services
Reviewer
- Conference: NeurIPS, ICML, ICLR, CoRL, RLC, AISTATS, ICASSP, CVPR
- Journal: RA-L, TPAMI, IJCV